5.2.1 The following is the open subsets in the topology consisting of one or two elements
Since any homeomorphism takes open subsets to open subsets, and preserves the number of elements, we see that the only possibilities are
(1) f = id.
(2) f(1) = 1, f(2) = 3, f(3) = 2, f(4) = 4.
The first case is a homeomorphism. It is easy to verify that the second case is also a homeomorphism.
5.2.2 If f: R → R is strictly increasing, onto, and continuous, then f is invertible, and from calculus, we also know that f is invertible, and f-1 is also strictly increasing and continuous. Therefore we conclude that any strictly increasing continuous function satisfying (the condition is equivalent to unto)
limx→-∞f(x) = -∞, limx→∞f(x) = ∞,
is a homeomorphism. By the similar reason, any strictly decreasing continuous function satisfying
limx→-∞f(x) = ∞, limx→∞f(x) = -∞,
is a homeomorphism.
Suppose f is continuous but is neither strictly increasing nor strictly decreasing. Then we have a < b < c, such that one of the following four cases must happen:
- f(b) ≥ f(a) ≥ f(c).
- f(b) ≥ f(c) ≥ f(a).
- f(b) ≤ f(a) ≤ f(c).
- f(b) ≤ f(c) ≤ f(a).
In the first case, we apply the intermediate value theorem to the continuous function f on [b, c], and find b ≤ d ≤ c, such that f(d) = f(a). Since d ≥ b > a, we see that f is not one-to-one. Similar arguments show that in all other cases, f cannot be one-to-one. Thus f is not invertible and cannot be a homeomorphism.
5.2.3 For finite interval (a, b), the map f(t) = (1 - t)a + tb: (0, 1) → (a, b) is a homeomorphism.
For finite a, the map f(t) = a(1 - x)-1: (0, 1) → (a, ∞) is a homeomorphism. A similar construction shows that (-∞, a) is also homeomorphic to finite intervals.
Finally, in Example 5.2.1, we see that (-∞, ∞) = R is homeomorphic to finite open intervals.
5.2.4 We may think of the unit disk as made up of many concentrate circles and the square as made up of many concentrate squares. Then a homeomorphism can be constructed to send circles to corresponding squares. Alternatively, we may think of both pictures as made up of radial lines from the centers. Then a homeomorphism is a correspondence between lines at the same angles.
5.2.5 Let a strictly increasing function f: R → (0,1) be a homeomorphism. The map may be extended map to F: R ∪ {-∞, ∞} → [0,1] by F(-∞) = 0 and F(∞) = 0. F is invertible and sends the collection B corresponds to the collection {(α, β): 0 < α < β < 1} ∪ {[0, β): 0 < β < 1} ∪ {(α, 1]: 0 < α < 1}. Since the later collection induces the usual topology on [0, 1], F is a homeomorphism.
5.2.6 Let f: [0, 1] → (0, 1) be a continuous map. Then from calculus, because [0, 1] is a closed interval, f has minimum a and maximum b. Then 0 < a ≤ b < 1, and the values of f are between a and b. In particular, (1 + b)/2 ∈ (0, 1) is not a value of f, and f is not onto. This proves that [0, 1] is not homeomorphic to (0, 1). By replacing (0, 1) with [0, 1), the same argument (with 0 ≤ a in place of 0 < a) shows that [0, 1] is not homeomorphic to [0, 1).
Let f: [0, 1) → (0, 1) be a continuous map. If f is neither strictly increasing nor strictly decreasing, then by the argument in Exercise 5.2.2, we see that f is not one-to-one. Therefore in order for f to be a homeomorphism, f must be either strictly increasing or strictly decreasing. Suppose f is strictly increasing. Then f(0) is the minimum value of f. Since f(0) > 0, f cannot be onto (any number between 0 and f(0) is not a value). Therefore f is not a homeomorphism. Similarly, if f is strictly decreasing, we may also conclude that f is not a homeomorphism.
5.2.7 Let f: X → Y, g: Y → Z be homeomorphisms. Then the composition gf: X → Z is still continuous, with continuous inverse (gf)-1 = f-1g-1. Thus X and Z are also homeomorphic.
5.2.8 In both cases, the condition is the two spaces have the same number of elements.
5.2.10 1. The property is topological because it is described by open subsets and set theory. The finite complement topology has the property, but the other topologies do not have the property. Therefore the finite complement topology is not homeomorphic to the other topologies.
2. The Fréchet property is topological because it is described by closed subsets and set theory. B5 is not Fréchet because the only closed subsets are (-∞, a], which can not be single point. Since the other topologies are Fréchet, B5 is not homeomorophic to the other topologies.
3. B8 has countable topological basis. The lower limit topology cannot have countable topological basis.
5.2.11 Let B = {B1, B2, …} be a countable topological basis.
For any x, L = {Bi: x ∈ Bi} is a countable local topological basis at x. Therefore the space is first countable.
For any ball Bi, choose xi ∈ Bi. Then {x1, x2, …} is a countable dense subset. Therefore the space is separable.
5.2.12 Let {x1, x2, …} be a dense subset of a metric space. Then B = {B(xi, 1/n): i, n = 1, 2, …} is countable. For any x and ε > 0, find n satisfying 1/n < ε/2. by the density of the subset, there is xi satisfying d(x, xi) < 1/n. Then x ∈ B(xi, 1/n) and 1/n < ε/2 implies B(xi, 1/n) ⊂ B(x, ε). This proves that B is a topological basis.
5.3.1 In the given space Y = {1, 2, 3}, the only subspaces homeomorphic to Z = {a, b} with topology { ∅, {a}, {a, b} } is {1, 3}, with 1 and 3 mapped respectively to a and b. In the subspace of given X = {1, 2, 3, 4}, the similar subspaces are also {1, 2} and {1, 3}, also with 1 mapped to a. Since homeomorphism must take subspaces homeomorphic to Z to the same kind of subspace, we see that it must either take 1, 2 ∈ X respectively to 1, 3 ∈ Y or take 1, 3 ∈ X respectively to 1, 3 ∈ Y. Then we need to add a third point x ∈ X that will correspond to 2 ∈ Y. The point x must be open in the subspace {1, 2, x} or {1, 3, x}. Thus we conclude x = 4, and the only subspace of X homeomorphic to Y are {1, 2, 4} and {1, 3, 4}.
The closure of {4} in X = {1, 2, 3, 4} is {4} (the single point is also closed, and is the smallest closed subset containing {4}). Thus the closure in the subspace is also {4}.
5.3.2 By Lemma 5.3.2, the topological basis for the subspace topology is obtained by intersecting the topological basis for R with all the natural numbers N. Thus the subspace topology induced by B1, B2, B3, B4, B7, B8, B10 are all discrete. Thus the subspace topology induced by B5 is given by the topological basis consisting of {1, 2, 3, 4, …}, {2, 3, 4, …}, {3, 4, …}, …, and the subspace topology induced by B6 is given by the topological basis consisting of {1}, {1, 2}, {1, 2, 3}, {1, 2, 3, 4}, …. Finally, the subspace topology induced by B9 is the finite complement topology on N.
5.3.3 A topology is discrete if and only if any topological basis must contain all the single point subsets. Therefore a subset A has discrete subspace topology (induced by lower limit topology) if and only if for any a ∈ A, there is ε > 0, such that [a, a+ε) ∩ A = {a}. The condition is equivalent to the following: If an is a bounded decreasing sequence in A, then lim an does not lie in A.
Suppose R has the topology {(a, ∞)} ∪ {∅, R}. Then (a, ∞) ∩ A and ∅, A are all the open subsets of A. In order for any single point to be open, the necessary and sufficient condition is that A is either empty of contains only one point.
5.3.8 If U ⊂ Y is open in Y, then U = V ∩ Y for some open subset V of X. Since Y is also assumed to be open in X, we see that as intersection of two open subsets of X, U is also open in X.
Conversely, suppose U ⊂ Y is open in X. Then the equality U = U ∩ Y indicates (by taking V = U) that U is open in the subspace topology on Y.
5.3.9 C ⊂ Y is closed in the subspace topology
⇔ C = Y - V, where V ⊂ Y is open in the subspace topology
⇔ C = Y - V, where V = Y ∩ U for some open U ⊂ X
⇔ C = Y - Y ∩ U = Y ∩ (X - U) for some open U ⊂ X
⇔ C = Y ∩ D for some closed D ⊂ X.
In the last step, we use D = X - U.
5.3.10 By Lemma 4.6.2, y ∈ Y is in the closure of A in subspace topology of Y
⇔ if V ⊂ Y is open in the subspace topology, and y ∈ V, then V ∩ A is nonempty
⇔ if U ⊂ X is open in X, and y ∈ U, then (Y ∩ U) ∩ A = U ∩ A is nonempty
⇔ y is in the closure of A in the topology of X.
Note that in second ⇔, we use V = Y ∩ U, and the equality (Y ∩ U) ∩ A = U ∩ A follows from A ⊂ Y. Thus we conclude that
(closure of A in Y) = Y ∩ (closure of A in X).
The relation can also be proved by other characterizations of the closure in Lemma 4.6.1.
5.3.12 Let A ⊂ Z be open in Y ∪ Z. Then A = U ∩ (Y ∪ Z) for some open subset U of X. By A ⊂ Z and Y, Z disjoint, the equality A = U ∩ (Y ∪ Z) really means U ∩ Y = ∅ and U ∩ Z = A. Since Z is open in X - Y, we also have Z = W ∩ (X - Y) for some open subset W of X. Then by U ⊂ X - Y, we get A = U ∩ Z = U ∩ W ∩ (X - Y) = U ∩ W. Since both U and W are open subsets of X, we conclude that A is an open subset of X.
If Z is closed in X - Y, then the similar argument shows that any subset of Z that is closed in Y ∪ Z must also be closed in X.
5.3.13 By Lemma 5.3.3, the inclusion map i: Y → X is continuous. Therefore if f is continuous, then the restriction fY: Y → Z, which is equal to the composition fi, is continuous.
5.3.14 Suppose f is continuous. Then by Exercise 5.3.13, the restrictions fUi are continuous. Conversely, assume the restrictions fUi are continuous. Then for any open subset V ⊂ Y, the preimages (fUi)-1(V) are open in the subspace topology of Ui. By Exercise 5.3.8, because Ui are open in X, these preimages are also open subsets of X. Then by X = ∪Ui, we have f-1(V) = ∪(fUi)-1(V) is an open subset of X.
The whole argument for the case of open subsets almost works for the case of closed subsets (with the help of a similar version of Exercise 5.3.8, in which open are changed to closed). The only exception is in the last step, where we take (possibly infinite) union of subsets of X. While any union of open subsets is open, only finite union of closed subsets is closed. Therefore the similar statement is true for closed subsets under the additional condition that X = ∪ Ui is a finite union of closed subsets.
For a counterexample for the case of inifinite union of closed subsets, consider any map f: R → R, where both R have the usual topology. The decomposition R = ∪x∈R{x} of left R into single point subsets is a union of closed subsets. Any map f satisfies the condition that the restrictions f{x}: {x} → R are continuous. However, not every map is continuous.
5.3.15 Since f1 and f2 are equal on the intersection Y1 ∩ Y2, they can be combined to form a map f: X → Y. By Exercise 5.3.14, since U1 and U2 are open, the combined map f is continuous. Now the inverses f1-1: V1 → U1, f2-1: V2 → U2, f0-1: V0 → U0, are in the similar situation and can also form a continuous map g: Y → X. Since g is clearly an inverse of f, f is a homeomorphism.
In the second part, we only know the homeomorphisms, but not the condition f1 = f0 = f2, which could enable us to combine the maps together to form a map f. So we expect the answer to be no. A concrete example is given by the following two topologies on X = Y = {1, 2, 3, 4}, with U1 = V1 = {1, 2, 3} and U2 = V2 = {3, 4}.
In the third part, we note that the open condition can be replaced by the closed condition in the first part, and the conclusion remains true. The conclusion cannot hold if there is no open or closed conditions.
5.3.17 1. Since A is open in Y, for any a ∈ A, there is a ball B(a, εa) such that B(a, εa) ∩ Y ⊂ A. Similarly, we have B(b, εb) ∩ Y ⊂ B for points of B. Let U = ∪a ∈ A B(a, εa/2) and V = ∪b ∈ B B(b, εb/2). Then U and V are open subsets of X satisfying A = U ∩ Y and B = V ∩ Y. If x is in both U and V, then we have d(x, a) < εa/2 and d(x, b) < εb/2 for some a ∈ A and b ∈ B. Assume εa ≤ εb. Then we have d(a, b) < εb. Since a is inside Y, by B(b, εb) ∩ Y ⊂ B, we get a ∈ B. This contradicts with the assumption that A and B are disjoint. Therefore we proved that U and V are disjoint open subsets of X satisfying A = U ∩ Y and B = V ∩ Y.
2. Let {1, 2, 3} have the topology { ∅, {1, 3}, {2, 3}, {3}, {1, 2, 3} }. Then the subspace {1, 2} has the discrete topology. The open subsets A = {1} and B = {2} of the subspace are disjoint. However, any two open subsets of {1, 2, 3} respectively containing A and B must intersect.
3. Consider X = R with the usual metric. In the subspace Y = X - {0}, A = (-∞, 0) and B = (0, ∞) are disjoint and closed subsets. However, any closed subset containing A or B must contain 0. Therefore closed subsets U and V of X satisfying A = U ∩ Y and B = V ∩ Y must share 0 as common point.
5.4.1 The topological basis of the product topology consists of subsets of R2 of the form [a, b)×(c, ∞). Then we may use Lemma 4.6.2 (where open subsets are replaced by topological basis) to compute the closure of a straight line. The following is one scenario.
The following is another senario.
The following is the case of verticle straight line.
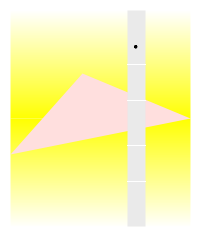
5.4.2 The ball around a point (black dot in the picture) is the grey strip (with finitely may horizontal lines deleted. The strip always intersect with the triangle if and only if the dot is in the yellow region (which extends to both ifinities in the vertical direction). Therefore the closure of the triangle is the infinite yellow strip.
5.4.3 1. σ is not continuous. σ-1(-1, 1) contains the origin 0 = (0, 0). However, if 0 ∈ B = (a, b)×(c, d), with a, b, c, d ∈ Z, then B ⊃ (-1, 1)×(-1, 1), which is not contained in σ-1(-1, 1). Therefore σ-1(-1, 1) is not open in the product topology.
By the similar reason the multiplicaiton map μ is also not continuous.
2. δ is continuous. We know δ: R2 → R is continuouswhen both sides are equipped with the usual topology. Since the lower limit otpology is finer than the usual topology, Rlower limit×Rusual is finer than the usual topology. Moreover, we know the finite complement topology is coarser than the usual topology. By making the usual topology on the left side finer, and the usual topology on the right side coarser, we find δ: Rlower limit×Rusual → Rfinite complement to be continuous.
3. σ is continuous, by Example 5.1.4. μ is not continuous, by considering the picturte in Exercise 5.1.3.
4. σ is not continuous. We have (1, 1) ∈ σ-1(2N). The only balls containing 1 is B = N. Since σ(B×B) = N ⊄ 2N, we see that σ-1(2N) is not open.
μ is continuous.We need to verify the openness of μ-1(pN) for prime number p. If xy = μ(x, y) ∈ pN, then since p is a prime number, it either divides x or divides y. Suppose p divides x, then x is in the ball pN, and y is in the ball N. Since μ(pN×N) = pN, we see that μ-1(pN) is open.
5. E is not continuous. The reason is the same as Example 5.4.4. For any f, t, and ε, we ask whether there are B = B(a1, …, an, t1, …, tn, δ1) and δ2, such that
g ∈ B and t ≤ t' < t + δ2 ⇒ f(t) ≤ g(t') < f(t) + ε.
By choosing t' satisfying t ≤ t' < t + δ2 and distinct from any of t1, …, tn, we may construct continuous g satisfying g(ti) = ai and g(t') < f(t).
6. E is not continuous. Consider the openness of the preimage E-1(R - c). For any f, t, and ε, we ask whether there are B = B(a1, …, an, t1, …, tn, δ1) and s1, …, sm, such that
g ∈ B and t' ≠ s1, …, sm ⇒ g(t') ≠ c.
It is easy to see that the implication does not hold.
7. E is not continuous. The reason is the same as Example 5.4.4. For any f, t0, and ε, we ask whether there are δ1 and δ2, such that
|g(t) - f(t)| < ε for all t, and t0 ≤ t' < t0 + δ2 ⇒ f(t0) ≤ g(t') < f(t0) + ε.
The implication does not work, because g(t) = f(t) - ε/2 and t' = t0 satisfies the left side but fails the right side.
8. σ is continuous. We only need to verify the openness of σ-1(B(a, t, ε)). Suppose σ(f, g) ∈ B(a, t, ε). Then |f(t) + g(t) - a| < ε. Let δ = [ε - |f(t) + g(t) - a|]/2. Then
(f', g') ∈ B(f(t), t, δ)×B(g(t), t, δ)
⇒ |f(t) - f'(t)| < δ and |g(t) - g'(t)| < δ
⇒ |f'(t) + g'(t) - a| ≤ |f(t) - f'(t)| + |g(t) - g'(t)| + |f(t) + g(t) - a| < 2δ + |f(t) + g(t) - a| < ε.
The right side means that (f', g') ∈ σ-1(B(a, t, ε)). This proves the continuity of σ.
The continuity of μ is similar.
5.4.5 The image of φ is X = {(g, h): g(1) = h(0)}. Let X have the subsapce topology and let i: X → C[0,1]×C[0,1] be the natural embedding. Let : C[0,1] → X be the map φ considered a mapping into X. Then = iφ. We need to prove φ is continuous and find a continuous inverse for .
The continuity of φ is the same as the continuity of its coordinates. The first coordinate of φ is the map λ(f)(t) = f(t/2). Since λ-1B(a, t, ε) = B(a, t/2, ε), we see that the first coordinate is continuous. The second coordinate is also continuous for the similar reason.
The inverse of is to "glue" two functions together, and can be expressed as the composition ψi, where ψ: C[0,1]×C[0,1] → C[0,1] is given by
ψ(g, h)(t) = g(2t) on [0, 1/2] and h(2t - 1) + g(1) - h(0) on [1/2, 1].
If t ∈ [0, 1/2], then ψ-1(B(a, t, ε)) = B(a, 2t, ε)×C[0,1]. If t ∈ [1/2, 1], then ψ-1(B(a, t, ε)) = C[0,1]×B(a, 2t - 1, ε). In either case, we see that ψ-1(B(a, t, ε)) is open in the product topology. This proves that ψ is continuous.
5.4.6 By Lemma 5.4.3, the map h(x) = (f(x), g(x)): X → Rusual×Rusual is continuous. Since the product Rusual×Rusual is R2 with the usual topology, the linear function l(s, t) = αs + βt: Rusual×Rusual→ Rusual is continuous. Then the composition αf + βg = lh (l composed with h) is continuous.
The subset {x: f(x) < g(x) < h(x)} = (g - f)-1(0, ∞) ∩ (h - g)-1(0, ∞). Since both g - f and h - g are continuous, the preimages, and their intersection, are open. Similarly, {x: f(x) ≤ g(x) ≤ h(x)} is closed because it is equal to (g - f)-1[0, ∞) ∩ (h - g)-1[0, ∞).
5.4.8 The following shows how a homeomorphism can be constructed, in which the lines with the same color correspond to each other.
5.4.9 The natural map i(x) = (x, b): X → X×b has an obvious inverse j(x, b) = x: X×b → X. We need to show both i and j are continuous.
In order to do this, we need to know the topology on the subspace X×b of X×Y. By definition, the product topology is induced by the topological basis
{U×V: U open in X, V open in Y}.
Then by Lemma 5.7, the subspace topology of X×b is given by the topological basis
{U×V ∩ X×b: U open in X, V open in Y} = {U×b: U open in X}.
By Lemma 5.2,we may check the continuity by looking at the preimages of the topological basis. Since for the subset U×b in the topological basis, i-1(U×b) = U is indeed an open subset of X, we conclude that i is continuous.
To prove j is continuous, we take an open subset U of X and consider the preimage j-1(U). Since
j-1(U) = U×b = U×Y ∩ X×b,
with U open in X and Y open in Y, we see that j-1(U) is in the topological basis. In particular, it is open in the subspace topology.
5.4.10 Suppose W ⊂ X×Y is open in the product topology. We need to show π1W is open in X.
If x ∈ π1W, then we have some y ∈ Y, such that (x, y) ∈ W. Since W is open, we have open subsets U ⊂ X and V ⊂ Y, such that (x, y) ∈ U×V ⊂ W. Applying π1, we have x = π1(x, y) ∈ U = π1(U×V) ⊂ π1W. In summary, we have shown
x ∈ π1W ⇒ x ∈ U ⊂ π1W for some open U ⊂ X.
This implies π1W is open.
Let R have the usual topology. The projection R2 → R to the first coordinate takes the closed subset {(t, t-1): t > 0} to the open (and not closed) subset (0, ∞).
5.4.11 If X and Y are discrete, then any single point sets {x}, {y} are open, so that the product {(x, y)} = {x}×{y} is open in the product topology. In other words, any single point set is open in the product topology, so that the product topology is discrete.
Suppose X×Y is discrete. Then the single point set {(x, y)} is open. Therefore we have (x, y) ⊂ U×V ⊂ {(x, y)} for some open subsets U, V of X and Y. The inclusion relation implies U = {x} and V = {y}. Therefore single point subsets are open in X and Y.
If X and Y are trivial, then it is easy to see that the product topology is trivial. If X is not trivial, containing an open subset U ≠ ∅ or X. Then U×Y is an open subset of X×Y that is neither ∅ nor X×Y. Therefore the product topology is not trivial. We conclude that X×Y is trivial if and only if X and Y are trivial.
If X and Y have finite complement topology, then X×Y will have open subsets of the form (X - F)×Y = X×Y - F×Y, where F is finite in X. If Y is infinite and X contains at least two points, then F×Y can be infinite, and (X - F)×Y may not be open in the finite complement topology. Similar argument can be made with X and Y exchanged. Therefore the product of finite complement topologies is again a finite comllement topology if and only if we are in one of the following cases (1) X has only one element; (2) Y has only one element; (3) X and Y are finite.
Conversely, if the product topology on X×Y is the finite complement topology, then any subspace also has finite complement topology. By Exercise 5.4.9, X and Y must have finite complement topology. The discussion above then gives all the possibilities.
5.4.12 (f, g) is continuous if and only if (f, g)-1(U×V) = f-1(U)×g-1(V) is open for any open subsets U ⊂ X and V ⊂ Y. By taking U = X or V = Y, we see that g-1(V) and f-1(U) should be open. Conversely, if both g-1(V) and f-1(U) are open, then their product is also open. Therefore (f, g) is continuous ⇔ f-1(U) and g-1(V) are open for any open subsets U ⊂ X and V ⊂ Y ⇔ f and g are continuous.
5.4.13 By Lemma 5.4.3, the map γ is continuous ⇔ the identity map and the map f are continuous. Since the identity is always continuous, this proves the first part.
The continuity of γ implies that the map g(x) = (x, f(x)): X → γ(X) is continuous, where γ(X) has the subspace topology of the product topology on X×Y. Moreover, g has an inverse which is obtained by restricting the projection π1: X×Y → Y to the subset γ(X)and is therefore also continous. This completes the proof that g is a homeomorphism, i.e., γ is an embedding.
5.4.14 1. By definition of product topology and Exercise 5.4.10.
2. X×Y - A×B = (X - A)×Y ∪ X×(Y - B). Since A and B are closed, X - A and Y - B are open. Therefore (X - A)×Y ∪ X×(Y - B) is open, which implies A×B is closed.
Conversely, suppose A×B is closed, and b ∈ B (i.e., B is not empty). Now we prove X - A is open. Let x ∈ X - A. Then x ∉ A, and (x, b) ∉ A×B. Since A×B is closed, we can find open U, V, such that x ∈ U, b ∈ V, and (U×V) ∩ (A×B) = ∅. Since b ∈ B∩V, we conclude that A ∩ U = ∅. In summary, for x ∈ X - A we have found an open subset U ⊂ X, such that x ∈ U, and U ⊂ X - A. This implies X - A is open.
3. By Lemma 4.6.2, x ∈ A, y ∈ B
⇔ For any x ∈ U and y ∈ V, U and V open, we have U ∩ A ≠ ∅ and V ∩ B ≠ ∅
⇔ For any (x, y) ∈ U×V, U and V open, we have (U ∩ A)×(V ∩ B) = (U×V) ∩ (A×B) ≠ ∅
⇔ (x, y) ∈ .
4. This follows directly from the definition of limit points and the computation of the closure, in which topological basis may be used instead of all open subsets.
5. By ∂A = A ∩ , we have ∂(A×B) = ∩ = ∩ [ ∪ ] = ( A×B ∩ ×Y ) ∪ ( A×B ∩ X× ) = (A ∩ )×B ∪ A×(B ∩ ) = ∂A×B ∪ A×∂B.
5.5.1 Let f: X → Y be an onto map.
If X has the discrete topology, then for any subset V ⊂ Y, f-1(V) is, as a subset of X, open. Therefore any subset of Y is open in the quotient topology. In other words, the quotient topology is the discrete topology.
Now suppose X has the trivial topology, then the only open subsets V of Y are those such that f-1(V) is either empty or the whole X. Clearly, f-1(V) = ∅ ⇔ V= ∅. Moreover, since f is onto, f-1(V) = X ⇔ V = Y (for general, not necessarily onto f, f-1(V) = X ⇔ f(X) ⊂ V). Thus we conclude that the quotient topology is also the trivial topology.
5.5.2
| topo basis | open subsets |
| 1 | ∅, {+}, {-}, {+,-}, {+, -, 0} |
| 2 | ∅, {+}, {-}, {+,-}, {+, 0}, {+, -, 0} |
| 3 | ∅, {+}, {-}, {+,-}, {-, 0}, {+, -, 0} |
| 5 | ∅, {+}, {+, -, 0} |
| 6 | ∅, {-}, {+, -, 0} |
| 7 | ∅, {+}, {-}, {+,-}, {+, -, 0} |
| 8 | ∅, {+}, {-}, {+,-}, {+, 0}, {+, -, 0} |
| 9 | ∅, {+,-}, {+, -, 0} |
| 10 | ∅, {+}, {-}, {0}, {+,-}, {+, 0}, {-, 0}, {+, -, 0} |
5.5.3 1. If U ⊂ Y is open in the quotient topology, then f-1(U) is an open subset of X. Since f is onto, we have f(f-1(U)) = U. By the assumption that f takes open subsets of open subsets, we see that U is open in the given topology on Y. This proves that the given topology is finer than the quotient topology.
2. If we also know f is continuous, then by quotient topology being the finest topology making f continuous, the quotient topology is finer than the given topology. Combined with the earlier part, we conclude that the quotient topology and the given topology are the same.
5.5.4 By taking U = X, we get X×Y open. By taking U = V = ∅, we get ∅ open.
By ∪ ( Ui×Y ∪ Vi×b ) = (∪ Ui)×Y ∪ (∪ Vi)×b, union of open subsets are open.
By ( U×Y ∪ V×b ) ∩ ( U'×Y ∪ V'×b ) = (U ∩ U')×Y ∪ (V ∩ V')×b , intersection of open subsets are open.
A subset A ⊂ X is open in the quotient topology if and only if π1-1(A) = A×Y is of the form U×Y ∪ V×b. This happens if and only if A ∈ T. Therefore the quotient topology is T.
For any V ∈ T', the subset V×b = ∅×Y ∪ V×b is open. The image π1(V×b) = V may not be open in T because T' may be strictly finer.
5.5.6 1. A subset U of S1 is open in the quotient topology if and only if
φ(t) ∈ U ⇒ there is ε > 0, such that φ( (t - ε, t + ε) ∩ [0,1] ) ⊂ U.
For the case t ≠ 0 and 1, by taking ε small enough, the condition becomes
φ(t) ∈ U ⇒ there is ε > 0, such that φ(t - ε, t + ε) ⊂ U.
Since φ(t - ε, t + ε) is a small open arc around φ(t), the description above is consistent with the usual topology on S1. On the other hand, if U contains (1, 0) = φ(0) = φ(1), then the condition becomes
φ(0) ∈ U ⇒ there is ε1 > 0, such that φ[0, ε1) ⊂ U,
and
φ(1) ∈ U ⇒ there is ε2 > 0, such that φ(1 - ε2, 1] ⊂ U.
Combining the two, we conclude
(1, 0) ∈ U ⇒ there are ε1, ε2 > 0, such that φ[0, ε1) ∪ φ(1 - ε2, 1] ⊂ U.
Since φ[0, ε1) ∪ φ(1 - ε2, 1] is a small open arc around the point (1, 0) in S1, the description above is also consistent with the usual topology on S1.
2. A subset U ⊂ R is open in the quotient topology if and only if
c = a - b ∈ U ⇒ there are ε1, ε2 > 0, such that V = [a, a + ε1) - [b, b + ε2) ⊂ U.
The subset V consists of x - y with a ≤ x < a + ε1 and b ≤ y < b + ε2. It is easy to see that V = (c - ε2, c + ε1). Therefore the condition on U is
c ∈ U ⇒ there are ε1, ε2 > 0, such that (c - ε2, c + ε1) ⊂ U.
Therefore the quotient topology is the usual topology.
3. A subset U ⊂ R is open in the quotient topology if and only if
c = ab ∈ U ⇒ there are ε1, ε2 > 0, such that V = [a, a + ε1)[b, b + ε2) ⊂ U.
Similar to the second part, in case c > 0, we need to consider a, b > 0, in which case V = [c, c + ε), and a, b < 0, in which case V = (c - ε', c]. Thus the condition becomes
c ∈ U ⇒ there are ε, ε' > 0, such that (c - ε', c + ε) ⊂ U.
In case c > 0, we need to consider a > 0, b < 0 or a < 0, b > 0. In both cases, we get V = (c - ε', c + ε). Thus the condition becomes
c ∈ U ⇒ there are ε, ε' > 0, such that (c - ε', c + ε) ⊂ U.
In case c = 0, we need to consider the case a = 0, b > 0, the case a = 0, b < 0, and the case a = b = 0, and the other cases by exchanging a and b. In all cases, we get either V = [0, ε), V = (- ε, 0], or V = (- ε', ε). Taking the (finite) union of all the cases, we find the condition is
0 ∈ U ⇒ there are ε, ε' > 0, such that (- ε', ε) ⊂ U.
We conclude that the quotient topology is the usual topology.
4. Since (a, ∞) + (b, ∞) = [a + b, ∞), by the argument similar to the second part, a subset U ⊂ R is open in the quotient topology if and only if
c = a + b ∈ U ⇒ there are ε1, ε2 > 0, such that (a - ε1 + b - ε2, ∞) = (c - ε1 - ε2, ∞) ⊂ U.
We conclude that the quotient topology is the usual one.
5. We have σ-1(2) = {(1, 1)}, σ-1(3) = {(1, 2), (2, 1)}, σ-1(4) = {(2, 2)}. Among the unions of the subsets, only σ-1(2), σ-1(2) ∪ σ-1(3) and σ-1(2) ∪ σ-1(3) ∪ σ-1(4) are open in {1, 2}2. Therefore the open subsets in {2, 3, 4} are ∅, {1}, {2, 3}, {2, 3, 4}.
6. For ε < |a|, we have (a - ε, a + ε)2 = (a2 - ε1, a2 + ε2). We also have (- ε, ε)2 = [0, ε2). Then by the argument similar to the second part, a subset U ⊂ R is open in the quotient topology if and only if
c = a2 ≠ 0 ∈ U ⇒ there are ε1, ε2 > 0, such that (a2 - ε1, a2 + ε2) = (c - ε1 - ε2, ∞) ⊂ U.
and
0 ∈ U ⇒ there is ε > 0, such that [0, ε2) ⊂ U.
We conclude that the quotient topology is the usual one.
7. We already know E: C[0,1]pt conv → R3usual is continuous. This implies that R3quotient is finer than R3usual.
On the other hand, consider the map P(a, b, c) = a + bt + ct2: R3usual → C[0,1]pt conv. From Example 5.18, we know that P is continuous. Since E: C[0,1]pt conv → R3quotient is continuous by the definition of the quotient topology, the composition EP(a, b, c) = (a, a + b/2 + c/4, a + b + c): R3usual → R3quotient is continuous. Since EP: R3usual → R3usual is clearly a homeomorphism of R3usual to itself, we conlude that the composition id = EP(EP)-1: R3usual → R3usual → R3quotient is continuous. This implies R3quotient is coarser than R3usual.
5.5.8 Consider X = {1, 2a, 2b, 3}, Y = {1, 2, 3}, and the onto map f: X ⇒ Y, f(1) = 1, f(2a) = f(2b) = 2, f(3) = 3. Let X have the topology T = { ∅, {1, 2a}, {2b, 3}, X }. Then the quotient topology is trivial. If we take T as the topological basis for the topology T on X, however, the image f(T) = { ∅, {1, 2}, {2, 3}, Y } is not even a topological basis.
For another example, take the torus in Figure 5.5.5. Note that the square has a topological basis that contains either half of (2). However, their images on the torus are not in any topological basis for the quotient topology, because neither image is open in the quotient topology.
The first example is actually motivated from the second one.
5.5.10 A subset V ⊂ Z is open in the g-induced quotient topology
⇔ g-1(V) ⊂ Y is open in the f-induced quotient topology
⇔ f-1(g-1(V)) = (fg)-1(V) ⊂ X is open
⇔ V ⊂ Z is open in the fg-induced quotient topology