7.1.1
1. Not Hausdorff. A subbasis contains 2 if and only if it contains 4. This implies that a basis contains 2 if and only if it contains 4.
2. Not Hausdorff. Any nN containing 2 must also contain 4.
3. Not Hausdorff. Any 2nN containing 2 must also contain 4.
1. Not Hausdorff. A basis contains 0.1 if and only if it contains 0.2.
2. Not Hausdorff. Any basis containing 0.2 must also contain 0.1.
3. Not Hausdorff. Any basis containing 0.1 must also contain 0.2.
4. Not Hausdorff. Any basis containing 1 must also contain 2.
5. Not Hausdorff. Any basis containing 2 must also contain 1.
6. Not Hausdorff. Any basis containing an must also contain an+1.
1. Not Hausdorff. All basis contain 0.
2. Not Hausdorff. Any basis containing 2 must also contain 3.
3. Not Hausdorff. Any nZ containing 2 must also contain 4.
4. Not Hausdorff. Any 2nZ containing 2 must also contain 4.
7.1.2 Suppose A ⊂ R contains two distinct numbers a and b. Assume a < b. Then open subsets of A that contains a are of the form (c, ∞) ∩ A, with c < a. Such open subsets must also contain b. Therefore the Hausdorff condition is not satisfied.
7.1.3 If the subset does not contain either 0+ or 0-, then the subset is a subset of the usual R, as a topological subspace. Therefore the subspace is Hausdorff.
If the subset contains both 0+ and 0-, then we need to subset to be disjoint from (-ε, 0) ∩ (0, ε) for some ε > 0 in order for the subspace to be Hausdorff.
7.1.4 The product of the usual topology and the lower limit topology is Hausdorff (see Exercise 7.1.10). Any subspace is also Hausdorff (see Exercise 7.1.9).
For the other two products, all three subspaces are not Hausdorff.
7.1.5 Suppose U, V are open and x ∈ U and y ∈ V. Then U = X - F1 and V = X - F2, with both F1 and F2 finite. If X is infinite, then U ∩ V = X - F1 ∪ F2 ≠ ∅. Thus U and V cannot be disjoint, and we do not have Hausdorff property.
7.1.6 Let X be Hausdorff and x ∈ X. We need to show X - x is open. Let y ∈ X - x. Then x ≠ y. By Hausdorff property, we can find disjoint open U and V, such that x ∈ U and y ∈ V. In particular, x ∉ V. Therefore y ∈ V ⊂ X - x for an open V. This implies X - x is open.
The finite complement topology on an infinite set is not Hausdorff. However, any single point (being a finite subset) is closed.
7.1.7 By Exercise 7.1.6, any single point in a Hausdorff space must be closed. Therefore, by taking unions of single point subsets, we see that any finite subset is closed. In case the space is finite, this means any subset is closed, which means the topology is discrete.
7.1.8 In the definition of Hausdorff property, we need to find two open subsets with the desired (set-theoretical) properties. Since the subsets are still open in a finer topology, we conclude that, if a topology is Hausdorff, the finer one must also be Hausdorff. The converse is clearly not true.
7.1.9 Suppose X is Hausdorff, and Y ⊂ X is a subset. For y ≠ y' in Y, by considering y and y' as distinct points in X, we have disjoint open subsets U and V of X, containing y and y' respectively. Then U ∩ Y and V ∩ Y are disjoint open subsets of Y, containing y and y' respectively. This proves that the subspace Y is Hausdorff.
The subspace topologies on the two lines R+ and R- in the line with two origins are the same as the usual topology on R. Therefore the two subspaces are Hausdorff. However, the union R+ ∪ R- and the closure are the whole space, which is not Hausdorff.
7.1.10 Suppose X×Y is Hausdorff. Then for distinct x1 and x2, the points (x1, y) and (x2, y) are also distinct. Since X×Y is Hausdorff, we can find disjoint open U1×V1 and U2×V2, such that (x1, y) ∈ U1×V1 and (x2, y) ∈ U2×V2. Since y ∈ V1∩V2, the disjointness of U1×V1 and U2×V2 implies that U1 and U2 must be disjoint. Thus we have found disjoint open U1 and U2, such that x1 ∈ U1 and x2 ∈ U2. This shows X is Hausdorff. Similarly, Y is also Hausdorff.
Suppose X and Y are Hausdorff. If (x1, y1) ≠ (x2, y2), then either x1 ≠ x2, or y1 ≠ y2. If x1 ≠ x2, then by X Hausdorff, there are disjoint open U1 and U2, such that x1 ∈ U1 and x2 ∈ U2. Then U1×Y and U2×Y are disjoint open, such that (x1, y1) ∈ U1×Y and (x2, y2) ∈ U2×Y. The argument in case y1 ≠ y2 is similar. This shows X×Y is Hausdorff.
7.1.11 The definition of Hausdorff property means that the property in the exercise holds for n = 2. Suppose the property holds for n, we consider n + 1 mutually distinct points x1, …, xn, xn+1. By the inductive assumption, there are open subsets U1, …, Un, such that
Ui ∩ Uj = ∅, xi ∈ Ui.
For any 1 ≤ i ≤ n, by xi ≠ xn+1 and the Hausdorff property, there are open subsets V1, …, Vn, W1, …, Wn, such that
Vi ∩ Wi = ∅, xi ∈ Vi, xn+1 ∈ Wi.
Then U1 ∩ V1, …, Un ∩ Vn, W1 ∩ … ∩ Wn are disjoint open subsets containing x1, …, xn, xn+1 respectively.
7.1.13 The map h(x) = (f(x), g(x)): X → Y×Y is continuous. By Example 7.1.5, because Y is Hausdorff, the diagonal Δ(y) ⊂ Y×Y is a closed subset. Therefore h-1(Δ(y)) is a closed subset. Finally it is easy to see A = h-1(Δ(y)).
Direct Proof: The closeness of A can also be proved directly. This is the same as proving X - A = {x: f(x) ≠ g(x)} is open. For any x ∈ X - A. We have f(x) ≠ g(x). By Y being Hausdorff, we have disjoint open subsets U and V of Y, such that f(x) ∈ U and g(x) ∈ Y. Since f and g are continuous, we see f-1(U) and g-1(V) are open subsets of X. Now W = f-1(U) ∩ g-1(V) is an open subset of X, with x ∈ W. Moreover, if z ∈ W, then by f(z) ∈ U and g(z) ∈ V, and the fact that U and V are disjoint, we conclude that f(z) ≠ g(z). Thus we have verified W ⊂ X - A. This implies X - A is open.
7.1.14 The map h(x, y) = (f(x), y): X×Y → Y×Y is continuous. By Example 7.1.5, because Y is Hausdorff, the diagonal Δ(y) ⊂ Y×Y is a closed subset. Therefore h-1(Δ(y)) is a closed subset. Finally it is easy to see Γf = h-1(Δ(y)).
7.1.16 1. The continuity of all fi means that the subsets in the collection S = ∪i { fi-1(U): U ⊂ Yi is open } are open. By taking S as a topological subbasis, the induced topology T is the coarsest topology such that all fi are continuous.
2. Suppose fi(x) = fi(x') for any i. Then for any S ∈ S, we have x ∈ S if and only if x' ∈ S. By taking intersections, we find that for any topological basis subset B induced from S (i.e., B = S1 ∩ … ∩ Sn, Si ∈ S), we have x ∈ B if and only if x' ∈ B. Therefore x and x' cannot belong to disjoint topological basis subsets. Since Hausdorff property can be detected by using topological basis only, we see that for T to be Hausdorff, we must have fi(x) = fi(x') for any i implying x = x'.
3. Assume Yi are Hausdorff. Assume x ≠ x' implies fi(x) ≠ fi(x') for some i. Then for the distinct points fi(x) and fi(x') of Yi, by the Hausdorff property, there are open disjoint subsets U and V of Yi, such that fi(x) ∈ U and fi(x') ∈ V. This implies that the subsets fi-1(U) and fi-1(V) are disjoint, open in T, and contain x and x' recpectively. This proves T is Hausdorff.
8.1.4 Think of the Möbius band as obtained by identifying the left and right edges of a rectangle as follows. Then the self-homeomorphism that carries the green arrows as in the picture reverses the direction of the boundary (which is the top and bottom edges).
8.1.6 1. Let U ⊂ X be open. For any y ∈ f(U), we have y = f(x) for some x ∈ U. Since f is a local homeomorphism, there is an open subset V around x, such f(V) is open in Y and the restriction f: V → f(V) is a homeomorphism. Since U ∩ V is an open subset of V, by the homeomorphism, f(U ∩ V) is an open subset of f(V). Since f(V) is open in Y, f(U ∩ V) is also an open subset of Y. Thus we have shown that for any y ∈ f(U), there is an open subset f(U ∩ V) of Y lying between y and f(U). This proves that f(U) is an open subset of Y.
2. At any point x of the sphere Sn, by taking x to be the "north pole", we have the corresponding "northern hemisphere" (not including the "equator"). The rectriction of f on the hemisphere is one-to-one and is a homeomorphism.
3. The manifold is described by local homeomorphism. Therefore if X and Y are locally homeomorphism, then X is a manifold if and only if Y is a manifold.
8.2.4 The punctured torus is the punctured square, with the sides identified as in the picture. The flipping with respect to the red line indeuces a homeomorphism from the punctured torus to it self. The restruction of the flipping to the circle in the middle reverses the direction.
8.2.6 For the commutative property, on both sides, we simply delete the disks at the same location on each surface and glue the boundary circles in the same way.
For the associativity, we need to remove two disks from S2. We can make sure the disks are disjoint. Then on both sides, we remove the same disks on S1 and S3, and the same disjoint disks on S2. Moreover, the glueing of the circles are also the same. The result is the obvious equality for both sides.
The connected sum of any surface with S2 is the same as deleting a disk and then glue S2 - B2 (which is also a disk) back. This obviously does not change the surface.
8.2.7 We get the real projective space P2.
Think of P2 as a Möbius band M union with a small disk D. The following two actions should give the same result
- Take M and collapse its boundary to a point.
- Take P2 and shrink the subset D to a point.
Since shrinking a small disk inside any surface still give you the same surfave, we conclude that collapsing the boundary of the Möbius band gives you P2.
Another explaination is the following.
8.2.8 Glueing the two boundary circles together is the same as attaching the two ends of a tube H to the two boundary circles of the disjoint disks. There are two ways of doing the attachment. Assuming the disjoint disks to be inside a bigger disk D ⊂ S, the following picture shows the two ways.
The effect is the same as glueing D ∪ H to S - D. Note that in the first way, D ∪ H = T2 - D2, and in the second way, D ∪ H = K2 - D2. Therefore the surface we get is either (S - D) ∪ (T2 - D2), the connected sum of S and the torus, or (S - D) ∪ (K2 - D2), the connected sum of S and the Klein bottle.
8.3.2 Condition A needs to be modified to "each edge belongs to either one or two faces". Contion B needs to be modified to "each vertex has σ1, …, with either σ1 = σn+1 or σ1 ≠ σn+1". The case σ1 ≠ σn+1 means that the vertex is a boundary point.
8.4.1 We may draw the planar diagram as a disk.

A detailed inspection on how the points of the boundaries are identified shows that it is exactly the opposite pairs that are identified. We know this gives us the real projective space.
8.5.1 We cut and paste as follows
The result is two Mobius bands (after identifying the pairs a1 and a2). The boundaries of both Mobius bands are cd.
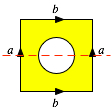
8.5.2 To list all possibilities, we first consider the case the identification edges are separated, i.e., left and right are identified, and top and bottom are identified. Denoting upward left as a and rightward top as b, there are three choices for the directions for the right edge and bottom edge.
The first is torus. The second is Klein bottle. The third is projective space, because we may replace ab by c, and the identification becomes the one in Figure 8.4.2.
The second possibility is two adjacient pairs, i.e., left and top are identified, and bottom and right are identified. We may denote upward left as a and rightward bottom as b. Then there are three choices for the directions for the right edge and top edge.
After identifying b, the first becomes Figure 8.4.1, and the result is a sphere. The second is Klein bottle by Lemma 8.5.2. The third is the projective space, because after identifying b, we get Figure 8.4.2.
8.5.3 The eight triangle diagrams are abc, ab-1c, abc-1, ab-1c-1, acb, ac-1b, acb-1, ac-1b-1 (abc, bca, c-1b-1a-1, … are the same triangle diagrams). Since gluing aw with av gives wv-1, we have the following combinations
| combination | glue a together | result |
| abc, ab-1c | bcc-1b | P2 |
| abc, abc-1 | bccb-1 | P2 |
| abc, ab-1c-1 | bccb | K2 |
| abc, acb | bcb-1c-1 | T2 |
| abc, ac-1b | bcb-1c | K2 |
| abc, acb-1 | bcbc-1 | K2 |
| abc, ac-1b-1 | bcbc | P2 |
| ab-1c, abc-1 | b-1ccb-1 | K2 |
| ab-1c, ab-1c-1 | b-1ccb | P2 |
| ab-1c, acb | b-1cb-1c-1 | K2 |
| ab-1c, ac-1b | b-1cb-1c | P2 |
| ab-1c, acb-1 | b-1cbc-1 | T2 |
| ab-1c, ac-1b-1 | b-1cbc | K2 |
| abc-1, ab-1c-1 | bc-1cb | P2 |
| abc-1, acb | bc-1b-1c-1 | K2 |
| abc-1, ac-1b | bc-1b-1c | T2 |
| abc-1, acb-1 | bc-1bc-1 | P2 |
| abc-1, ac-1b-1 | bc-1bc | K2 |
| ab-1c-1, acb | b-1c-1b-1c-1 | P2 |
| ab-1c-1, ac-1b | b-1c-1b-1c | K2 |
| ab-1c-1, acb-1 | b-1c-1bc-1 | K2 |
| ab-1c-1, ac-1b-1 | b-1c-1bc | T2 |
| acb, ac-1b | cbb-1c | P2 |
| acb, acb-1 | cbbc-1 | P2 |
| acb, ac-1b-1 | cbbc | K2 |
| ac-1b, acb-1 | c-1bbc-1 | K2 |
| ac-1b, ac-1b-1 | c-1bbc | P2 |
| acb-1, ac-1b-1 | cb-1bc | P2 |
8.6.1 Using T2#P2 = P2#P2#P2 from Lemma 8.5.3, T2#K2 = T2#(P2#P2) = (T2#P2)#P2 = (P2#P2#P2)#P2 = (P2#P2)#(P2#P2) = K2#K2.
8.6.2 Using T2#P2 = P2#P2#P2 from Lemma 8.5.3, mT2#nP2 = mT2 in case n = 0. mT2#nP2 = (2m + n)P2 in case n ≠ 0.
8.7.1 By χ(X∪Y) = χ(X) + χ(Y) - χ(X∩Y), we have
χ(S1#S2) = χ(S1 - B2) + χ(S2 - B2) - χ(S1) = χ(S1 - B2) + χ(S2 - B2),
χ(S) = χ(S - B2) + χ(B2) - χ(S1) = χ(S - B2) + 1.
Combining the two, we get
χ(S1#S2) = χ(S1) - 1 + χ(S2) - 1 = χ(S1) + χ(S2) - 2.
Then Lemma 8.7.1 my be proved by induction: If we already know χ(gT2) = 2 - 2g, then χ((g + 1)T2) = χ(gT2#T2) = χ(gT2) + χ(T2) - 2 = (2 - 2g) + 0 - 2 = 2 - 2(g + 1).
8.7.2 In a triangulation of closed surface, the boundary of each face consists of three edges, and each edge is shared by exactly two faces. Therefore if we count the number of edges by considering them as boundary parts of faces, then we get 3f, and each edge is counted twice in this number. This implies 3f = 2e.
The euler formula is v - e + f = χ(S). Substituting 3f = 2e into the formula, we get v - (1/2)f = v - (3/2)f + f = χ(S), so that f = 2(v - χ) and e = (3/2)f = 3(v - χ).
Since there is at most one edge between any two vertices, the number of edges cannot be more than the number of pairs of vertices. In formula, this means e ≤ v(v - 1)/2. Substituting the formula for e in terms of v and χ, we get 3(v - χ) ≤ v(v - 1)/2, which is the same as v2 - 7v + 6χ ≥ 0. Solving the quadrati inequality, we get
v ≥ (7 + √)/2 or v ≤ (7 - √)/2.
For connected surfaces, we have χ ≤ 2, so that the second inequality cannot happen. So the first inequality holds.
8.7.6 1. hongkongh-1k-1 There are three vertices. The Euler number is 3 - 5 + 1 = -1. Therefore the surface is 3P2.
2. abcdeac-1edb-1 There are two vertices. The Euler number is 2 - 5 + 1 = -2. Since there are twisted pairs, the surface is not oriented. Therefore the surface is 4P2.
3. abc-1d-1ef-1fe-1dcba-1 There are six vertices. The Euler number is 6 - 6 + 1 = 1. The surface is P2.
4. abc-1db-1ea-1fgd-1g-1hci-1f-1e-1ih-1 There are two vertices. The Euler number is 2 - 9 + 1 = -6. Since there are no twisted pairs, the surface is oriented. Therefore the surface is 4T2.
5. By experimenting with small n, we see the pattern for the number of vertices. The number is 1 for even n, and is 2 for odd n. Thus the Euler number is
1 - n + 1 = 2 - n for even n, 2 - n + 1 = 3 - n for odd n.
Since there are no twisted pairs, the surface is orientable. Therefore the surface is
(n/2)T2 for even n, ((n - 1)/2)T2 for odd n.
6. We have two identical strings labeled a1a2…an. By combining the strings, the diagram is equivalent to aa. Thus the surface is P2.
8.7.8 The square diagrams are abcd, acdb, ac-1d-1b. Note that gluing aw with av gives wv-1.
Gluing abcd and acdb gives bcdb-1d-1c-1 = bcdb-1(cd)-1 = beb-1e-1, which is T2.
Gluing abcd and ac-1d-1b gives bcdb-1dc. From the planar diagram we get one vertex. The Euler number is 1 - 3 + 1 = -1. Thus the surface is 3P2.
Gluing acdb and ac-1d-1b gives cdbb-1dc ∼ cddc ∼ ccdd, which is P2#P2 = K2.
8.7.9 If aba-1b-1 is the boundary of a disk, then the surface is the torus T2. If the disk is replaced by the Möbius band M, then the effect is the same as removing a disk from T2 and then glue the Möbius band M back. The result is T2#P2 = 3P2.
In general, suppose a boundary identification of a surface S - B2 (a compact surface with one boundary circle) is the same as the boundary identification of a planar diagram D. If the plananr diagram D gives the surface SD, then the identification of the boundary of S - B2 gives us the surface SD#S.
8.7.10 The surface Mk is obtained from Mk-1 by gluing a Möbius band M1 along an interval. Therefore Mk is not orientable (because it contains a Möbius band), and
χ(Mk) = χ(Mk-1) + χ(M1) - χ(interval) = χ(Mk-1) + 0 - 1 = χ(Mk-1) - 1
Then by χ(M1) = 0 and induction, we get χ(Mk) = 1 - k.
The surface obtained by gluing Mk with Ml is still not orientable and has the Euler number χ(Mk) + χ(Ml) - χ(circle) = (1 - k) + (1 - l) - 0 = 2 - k - l. Thus the surface is (k + l)P2.
8.7.11 By
χ(S) = χ(S - B1 - B2) + χ(B1) + χ(B2) - χ(two circles) = χ(S - B1 - B2) + 2,
we have χ(S - B1 - B2) = χ(S) - 2. The Euler number of the "double connected sum" is then
χ(S1##S2) = χ(S1 - B1 - B2) + χ(S2 - B1 - B2) - χ(two circles) = χ(S1) + χ(S2) - 4.
However, there are two ways of gluing circles together, in different directions. This may change the orientatability. Specifically, if both S1 and S2 are orientable, then S1##S2 may or may not be orientable. If at least one of S1 and S2 are nonorientable, then S1##S2 is not orientable.
For our case, T2##T2 has Euler number -4 and may be either 3T2 or 6P2. T2##P2 has Euler number -3 and must be 5P2.
8.7.12 If we cut through the red lines, we find that the "triple connected sum" is actually (S1#S2)#S3 = S1#S2#S3. In our case, we get 2P2#T2#2T2 = 2P2#3T2 = 8P2.